半導體公司有各種類型的步進電機IC。選擇驅動IC時,除了單極/雙極驅動和驅動電流值等基本規格外,還有一些關鍵規格。
本節對向步進電機驅動 IC 發出動作指令的信號的規格進行說明。
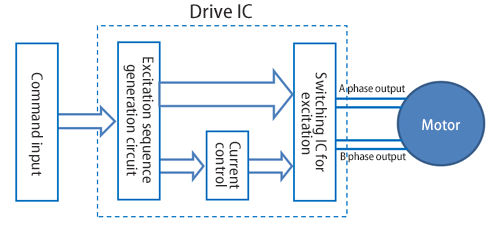
命令輸入接口
 要驅動電機,需要切換電機線圈各相的勵磁順序。
要驅動電機,需要切換電機線圈各相的勵磁順序。
通過按照固定順序切換各相的電機線圈電流,切換勵磁(N/S 極性),電機旋轉。
(下圖顯示了 2-2 相勵磁的示例。)
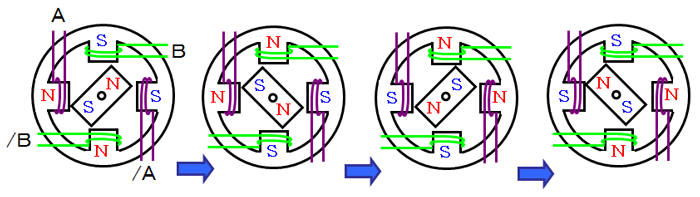
向驅動 IC 輸入命令以在驅動電機時切換此勵磁序列。
命令輸入的典型類型
一種。時鐘(=脈衝)輸入類型
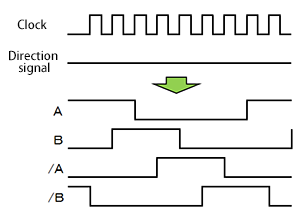 您可以使用兩種類型的信號控制電機:時鐘和方向。驅動 IC 將時鐘和方向信號轉換為內部電路中每相的勵磁序列以驅動電機。
您可以使用兩種類型的信號控制電機:時鐘和方向。驅動 IC 將時鐘和方向信號轉換為內部電路中每相的勵磁序列以驅動電機。
當時鐘改變時,激勵順序切換。電機速度由時鐘速度控制,電機旋轉量由時鐘數控制,電機旋轉方向由方向信號的高/低控制。
在具有微步兼容驅動IC的微步驅動中,您可以只使用時鐘和方向信號進行微步驅動,而無需考慮勵磁序列。
| 好處 | 使用兩種類型的信號輕鬆進行軟件控制:時鐘和方向。 |
|---|---|
| 缺點 | 如果時鐘線佈線跨越電路板,則可能會因噪聲而發生故障。 濾波器可以插入驅動器的信號輸入部分。 |
灣相位輸入型
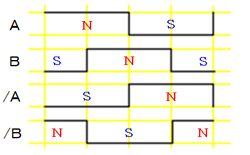
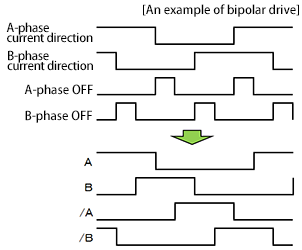 控制勵磁狀態的電平信號,如電流方向、勵磁開/關、電機線圈各相電流比等,產生控制電機所需的勵磁序列。
控制勵磁狀態的電平信號,如電流方向、勵磁開/關、電機線圈各相電流比等,產生控制電機所需的勵磁序列。
電機速度、旋轉量和旋轉方向由勵磁序列的切換順序和切換速度控制。
當用微步兼容驅動IC進行微步驅動時,除了下圖所示的信號外,還需要幾個控制電流比的信號。
| 好處 | 由於勵磁時序狀態由電平信號提供,因此即使存在噪聲也難以誤動作。 |
|---|---|
| 缺點 | 指令信號的數量根據勵磁方式而增加:2-2 相勵磁:2 線,1-2 相勵磁:4 線,W1-2 相勵磁:6 線。 此外,勵磁序列必須由控制軟件生成。 |
C。串行輸入類型
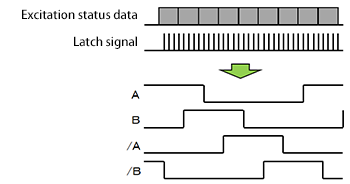 為了控制電機,使用兩到三個串行通信信號將勵磁序列等勵磁狀態數據輸入到驅動IC,與相輸入類似。
為了控制電機,使用兩到三個串行通信信號將勵磁序列等勵磁狀態數據輸入到驅動IC,與相輸入類似。
電機速度、轉速和旋轉方向由勵磁順序切換順序及其切換速度控制。
使用微步兼容驅動IC進行微步驅動時,除了勵磁序列外,還通過通信輸入電流比數據。
| 好處 | 由於通過串行通信反複寫入激勵序列,因此即使放置噪聲或佈線很長也很難發生故障。此外,命令信號的數量少至大約兩個或三個。 |
|---|---|
| 缺點 | 控制軟件需要很複雜才能生成勵磁序列並執行串行通信。 此外,這種類型不能以非常高的速度運行,因為它使用簡單的通信。 |
*另外,部分驅動IC內置控制功能,可直接輸入操作指令。
*時鐘輸入信號由 CPU 生成,但可能難以設置精細的時鐘頻率或執行平滑的速度變化
Nippon Pulse Motor 提供專用時鐘(=脈衝)生成 LSI,[PCL 系列] 和 [PCD 系列] 可以管理這些詳細設置。
【PCD系列】還可為相位輸入生成勵磁序列(2-2相和1-2相)。