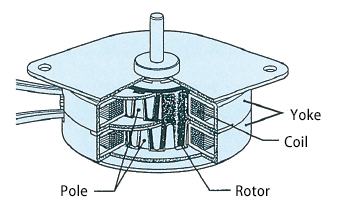
 勵磁是通過向電機線圈施加電流來電磁磁極的過程。電機線圈有兩組,A相線圈和B相線圈,每組對應兩極:正極和負極。 *1
勵磁是通過向電機線圈施加電流來電磁磁極的過程。電機線圈有兩組,A相線圈和B相線圈,每組對應兩極:正極和負極。 *1
這四個極在電角度方面彼此相隔 90 度。
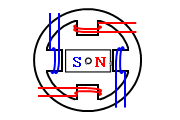 步進電機具有多組這四極排列的結構。在上圖中,顯示了一組四極。勵磁模式是您如何勵磁和旋轉內部轉子磁鐵。
步進電機具有多組這四極排列的結構。在上圖中,顯示了一組四極。勵磁模式是您如何勵磁和旋轉內部轉子磁鐵。
上圖中,磁鐵旋轉90度,這是一步的基本角度,四步旋轉360度的電角。
實際電機為:轉一圈=4步×對數。
例如NPM公司生產的PF25-48電機有12對4極,所以48是基本步數。
電機旋轉一圈的分度數由勵磁方式決定,有“2-2相勵磁/1-2相勵磁”和“微步”兩種方式。
*1線圈端子引腳為正極A相、負極A相、正極B相、負極B相。
A相線圈的A相和A相稱為1相和3相,B相線圈的B相和B相稱為2相和4相。
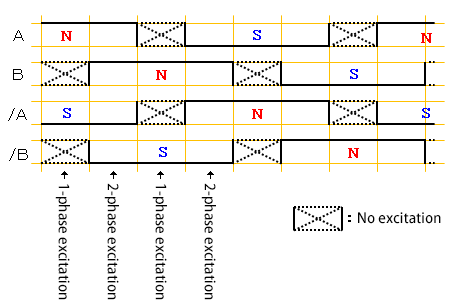
2-2相勵磁/1-2相勵磁
僅通過各相電機線圈的 ON/OFF 可以創建以下勵磁模式:
2-2相勵磁
1-1相勵磁*2
1-2相勵磁
1-1相勵磁和2-2相勵磁分四步以360度電角旋轉。
1-2 相勵磁通過交替 1-1 相勵磁和 2-2 相勵磁使分辨率加倍,電機以兩倍基本步數旋轉一圈。
例如,如果電機的基本步數為 48,則在 1-2 相勵磁中,旋轉一圈為 96 步。 1-2 相勵磁常用於減少電機的振動。
*2由於 1-1 相勵磁比 2-2 相勵磁具有較小的轉矩和阻尼特性,因此較少使用這種勵磁模式。
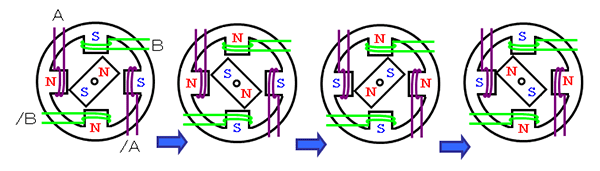
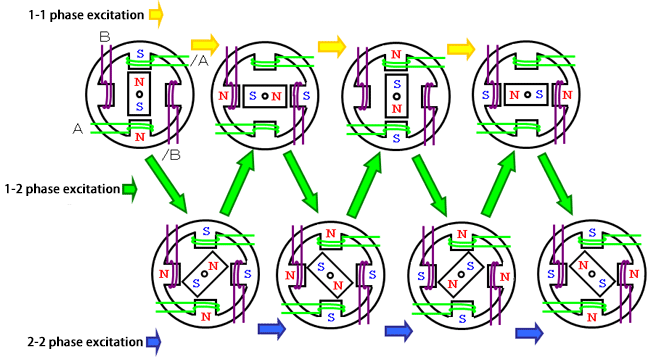
2-2相勵磁360度旋轉電角
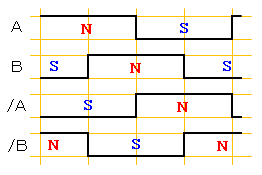 以固定順序切換每相的電機線圈電流並切換勵磁(N/S 極性)以旋轉電機。
以固定順序切換每相的電機線圈電流並切換勵磁(N/S 極性)以旋轉電機。
1-2相勵磁360度旋轉電角
 通過交替1-1相勵磁和2-2相勵磁,分辨率提高一倍,即1-2相勵磁。
通過交替1-1相勵磁和2-2相勵磁,分辨率提高一倍,即1-2相勵磁。
微步驅動
除了電機線圈各相的 ON/OFF 之外,通過改變流過 A 相和 B 相線圈的電流比,電機可以停在比基本步距角更小的位置。這稱為微步驅動。
微步勵磁方式有W1-2相勵磁、2W1-2相勵磁、4W1-2相勵磁等。
W1-2相勵磁為基本步數的四倍轉一圈。
2W1-2相勵磁為基本步數的八倍轉一圈。
4W1-2相勵磁為基本步數的16倍轉一圈。
例如,如果電機的基本步數為48,則W1-2相勵磁360度旋轉192步,2W1-2相勵磁384步,4W1-2相勵磁768步。 *3
*3由於微步改變電流比,轉子在基本步距角中間平衡停止,停止位置可能不准確,具體取決於電機結構。使用我們的 PF 電機,微步驅動可有效減少振動和噪音。
2相勵磁用
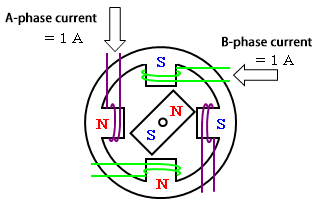 對於 2 相勵磁,A 相和 B 相的電流值相同。
對於 2 相勵磁,A 相和 B 相的電流值相同。
用於微步驅動
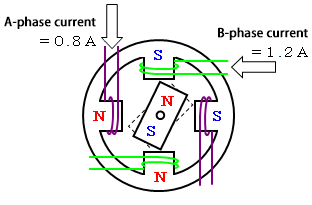 降低 A 相的電流,提高 B 相的電流,以增加 B 相線圈吸引的力,使磁鐵保持在中間。
降低 A 相的電流,提高 B 相的電流,以增加 B 相線圈吸引的力,使磁鐵保持在中間。
除了這些規格外,驅動 IC 還具有各種其他規格。
一旦您了解了基本知識,您就可以通過使用驅動 IC 輕鬆驅動步進電機。
在設計實際電路板時,不僅要注意規格,還要注意電流值和發熱,以及接地和電流檢測電阻的佈線。
半導體公司通常會向您提供此類驅動 IC 的評估板或技術文檔,因此使用它們會很有效。